Simultaneous Localization And Mapping Project (SLAM)
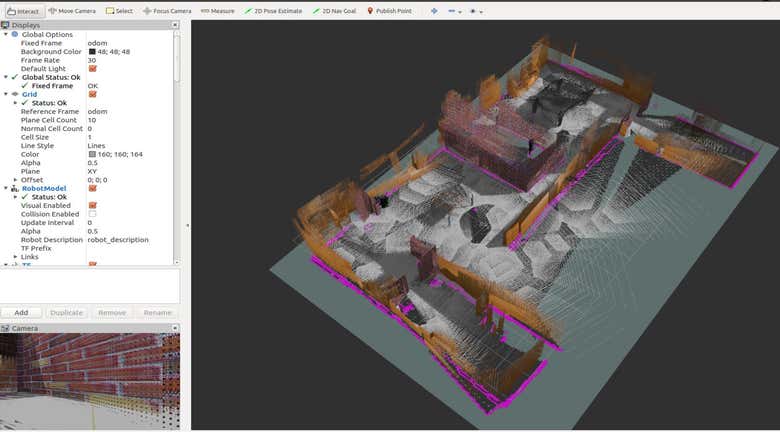
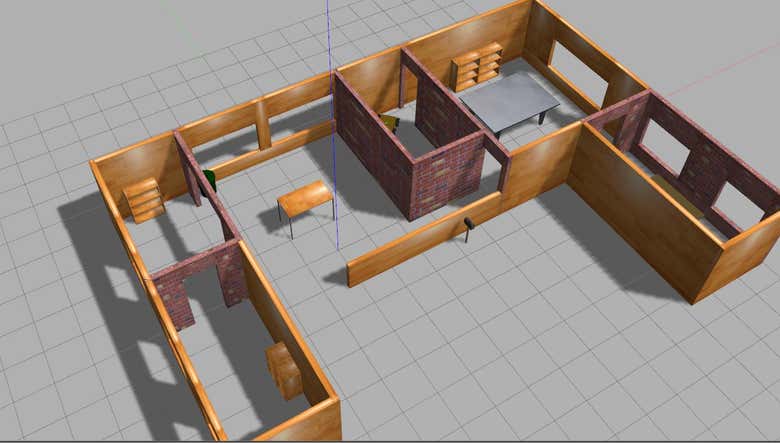
SLAM Project for localizing and mapping an indoor environment using Robot Operating System (ROS) and Gazebo simulation. The robot model includes : -Skid steering drive controller -Hokuyo laser range finder -Openni Kinect RGBD Camera -IMU sensor Final results consists of 2D and 3D maps of the environment and database of the previous process.

Despre mine
Greetings, I'm Ahmed. Thank you for visiting my Profile. I have +4 years’ experience in the fields of Robotics, ROS2 , Python, CPP, Electronics, Machine Learning, and Deep Learning. Presently, I am employed as a Robotics and AI Engineer at Trabotyx, a robotics startup focusing on agricultural robotics and delivering accurate weed control solutions for organic farmers. Specifically, I have extensive experience with the following technologies : ----------------------------------------------------------------------------------------- • Robot Operating System (ROS/ ROS2) • Python • C++ • Mapping • Localization • Path Planning • Autonomous Navigation • Computer Vision • RC robots’ systems • Hardware and sensors selection • Raspberry Pi • Jetson Boards( Nano, Xavier) • Deep Learning, Machine Learning solutions. • Object Detection • Data Featurization Extra skills : --------------- • Scikit-learn, Pandas, NumPy • Web Scraping • Data Exploration, Data cleaning, and bias analysis • SQLite3 databases • PCB Design Hardware and sensors experience : ------------------------------------------- • Cameras( Pi camera, ZED1/ ZED2 camera, Thermal imaging) • IMUs (Accelerometers, Gyros, Magnetometers) • Distance sensing ( IR, Ultrasonic, Proximity ) • LIDAR sensing • GPS modules • Motor drivers • Stepper Motors • Servo Motors Recent Projects: -------------------- • Implemented a visual servoing controller in CPP based on literature techniques • Developed a crop line detection based on Adaptive-ROI methods and implemented with Python • Building a compatible Navigation2 Three-Point-Turn controller • Constructed a robot mission management system using [login to view URL] and integrated it with ROS2 • Implemented autonomous navigation system for outdoor agricultural robots using Navigation2 & ROS2 • Building my robot platform for autonomous indoor navigation tasks and object Detection using ROS & Navigation stack. • Developed a 4WD robot for indoor autonomous or manual navigation using ROS, SLAM, LIDAR, move-base, Gazebo, and Raspberry Pi with added temperature and humidity sensors • Incorporated YOLOv3 /YOLOv5 into various robot platforms • Optimize GoPiGo Robot using ROS and distance sensors to allow the robot to autonomously navigate its environment while avoiding obstacles. • Integrating many AI capabilities like object detection, voice commands, and TTS into a robot platform. • Constructed a cheap bump detection and localization device using GPS, IMU, and ROS • Developed a DNN using NumPy with options for optimization, activation functions, layer number, loss functions, and regularization techniques such as Dropout and L2 regularization. • Created an accident detection algorithm using accelerometer data based on literature benchmarking methods • Conducted digital data processing, filtering, and visualization, and created an ML model for PPG signal to measure blood pressure and detect anxiety